
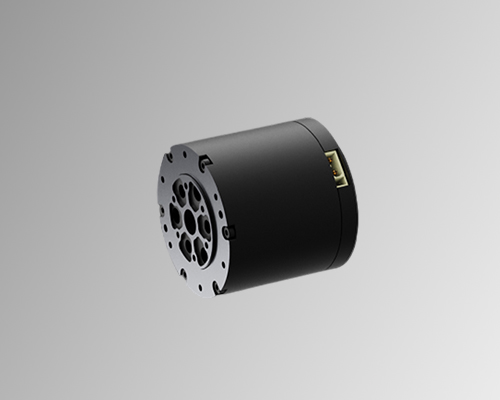
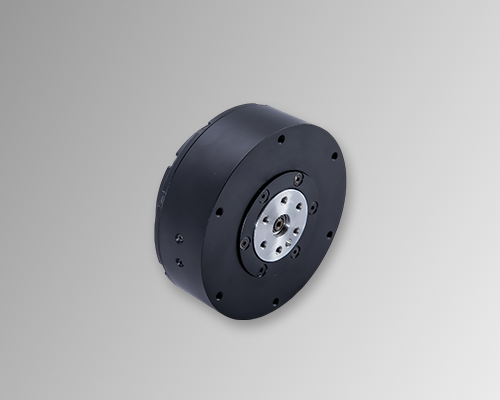
微科 VJMM11262-48 关节电机模组配备双编码器,输出轴支持单圈绝对位置检测,掉电后不会丢失绝对位置,同时采用电机与驱动器一体化设计,结构紧凑且集成度高;该电机支持上位机可视化调试与固件升级,可通过 CAN 总线实时反馈电机速度、位置、转矩、电机温度等关键信息,还具备双温度保护功能。
- 额定电压:48 V / 24 V
- 额定电流:23.5 A
- 峰值电流:95 A
- 额定扭矩:40 NM
- 峰值扭矩:120 NM
- 额定转速:100 RPM / 70 RPM
- 空载最大转速:200 RPM / 100 RPM
- 外径: 120 mm
- 高度: 53 mm
- 电机重量:1372 g
产品推荐


使用场景
微科 VJMM11262-48 关节电机是一款高扭矩集成驱动电机,凭借 40Nm 额定扭矩(峰值 150Nm)、10:1 减速比、双 14 位磁编编码器(单圈绝对位置输出,掉电不丢失信息)的核心配置,搭配 48V 额定电压、CAN@1Mbps 高速控制接口与 UART@921600bps 调参接口,支持 MIT、速度、位置多控制模式及过温、过压、过流等多重防护功能,核心适配重载机械臂关节(承载重型工件抓取搬运,保障高精度定位与连续作业)、重载 AGV/AMR 驱动轮(提供充足驱动力,适配吨级物料转运与多轮协同)、重载分拣 / 输送设备(稳定驱动推料机构与输送滚筒,适配复杂工况),同时可应用于医疗康复设备(重型康复训练器)、新能源特种车辆(小型电动叉车)等需大负载驱动、精准定位、长期稳定运行的工业与特种装备场景。
工业领域
通信领域
消费电子
轨道交通
低空飞行




常见问题解答
F
G
Q1:什么是一体化关节电机?
一体化关节电机是将伺服电机、减速器、编码器、驱动器及传感器集成于单一模块的机电一体化组件,可直接实现机器人关节的高精度运动控制,简化系统设计并提升可靠性。
F
G
Q2:核心技术参数有哪些?
F
G
Q3:如何根据需求选择合适的型号?
F
G
Q4:主要应用领域有哪些?
F
G
Q5:日常维护内容有哪些?
F
G
Q6:如何延长电机寿命?
F
G
Q7:常见故障及解决方法?
F
G
Q8:如何处理编码器故障?
联系我们
感谢您访问我们的网站!如果您有任何问题或建议,或者需要更多信息,请随时与我们联系。我们致力于为您提供最佳的服务体验,您的每一个问题都对我们非常重要。
